- 上一篇:ADAMS船用柴油机关键零件的多学科优化设计+matlab代码
- 下一篇:Solidworks蠕动式微管道机器人的结构设计+CAD图纸
4.4 以并联机构为主体的串并联机床机构在ADAMS中的运动仿真 30
4.4.1 ADAMS中并联机构的运动学逆解分析 30
4.4.2 ADAMS中并联机构的运动学正解分析 33
4.5 本章小结 34
结论与展望 35
致 谢 36
本科期间发表的学术论文 37
参 考 文 献 38
附 录 40
一、求解杆长矩阵的MATLAB程序 40
二、求解六杆参数变化理论曲线的MATLAB程序 42
第1章 绪论
1.1 并联机构的产生及其现实意义
1.1.1 选题背景
随着工业现代化的日益发展,机械制造行业也对传统数控机床的技术参数和各项指标提出了更高的要求,如何提高机床刚度和加工精度,并扩大机床加工范围已经成为工业现代化发展的重要课题。为了提高对高速度、高精度生产的适应性,满足日益发展的现代工业需求,近年来全球机械制造业都在积极研制新型多功能的制造设备与系统,其中在传统机床技术上的突破性进展当属90年代中期问世的并联机床[1](PMTs,Parallel Machine Tools),又称虚拟轴机床(Virtual Axis Machine Tools)或并联运动学机器(PKMs, Parallel Kinematics Machines)。并联机床是基于空间并联机构Stewart平台的原理[2]开发的,实质上是机器人技术和现代数控机床技术结合的产物,其原型是并联机器人操作机。它具有机器人的灵活与柔性,又能够提供机床的刚度和精度,是集多种功能于一体的新型机电设备。
与具有同等功能的传统五坐标机床相比,并联机构具有如下特点和优点:
(1) 刚度重量比大;
(2) 精度高;
(3) 响应速度快;
(4) 功能性强;
(5) 加工速度高,惯性低;
(6) 使用寿命长;
1.1.2 现实意义
这种新型机床采了多杆并联机构驱动,并能轻松地使用激光或传统测头,对于加工复杂及特种零件相当快捷。传统机构刀具只能沿固定导轨进给、刀具加工自由度偏低,而并联机构可实现多轴联动控制加工,改进了机械加工精度及质量,在许多领域都得到了成功的应用,被誉为“机床结构的重大革命”。图1.1所示为传统机床与并联机床结构对比图[2]。
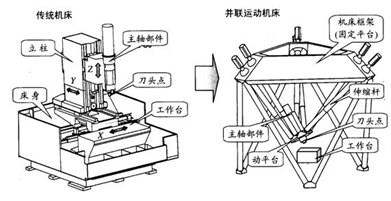
图1.1 传统机床与并联机床的结构对比
1.2 本课题国内研究现状与发展趋势
1.2.1 国外并联机床的发展现状
1.2.2 国内并联床的发展现状
1.2.3 并联机床的研究及发展趋势
1.3 本文的研究目的和研究内容
-
椭圆曲柄滑块间歇机构设计
-
油漆刷制刷机理毛机构设计+CAD图纸
-
FLUENT122mm榴弹弹道修正执行...
-
Pro/E房车手刹双棘轮式机构设计及分析
-
40mm3连发自动炮开关闩机构与击发机构设计
-
ADAMS锥形物料搬运机械手夹持机构设计与分析
-
70mm带螺旋导槽定向器快速连接机构设计
乳业同业并购式全产业链...
当代大学生慈善意识研究+文献综述
大众媒体对公共政策制定的影响
酸性水汽提装置总汽提塔设计+CAD图纸
河岸冲刷和泥沙淤积的监测国内外研究现状
中考体育项目与体育教学合理结合的研究
java+mysql车辆管理系统的设计+源代码
十二层带中心支撑钢结构...
电站锅炉暖风器设计任务书
杂拟谷盗体内共生菌沃尔...