- 上一篇:delta并联机器人机构设计
- 下一篇:液体介质球阀的设计
该课题主要研究火炮高低机设计。高低机是驱动火炮起落部分,赋予炮身俯仰角的动力传动装置。通常山手轮、传动链、自锁器及有关辅助装置等组成。在有外能源驱动的情况下,还设有手动与机动转换装置及变速装置等。高低机应设在起落部分与上架之间。其传动链末端构件中的一部分与摇架相连,另一部分应固定在上架中。根据传动链末端驱动起落部分的构件不同,高低机可分为齿弧式高低机、螺母丝杠式高低机、液压式高低机,其典型结构简介如下:
齿弧式高低机:这种高低机在其传动链的末端有齿轮齿弧副。为保证自锁,常采用一对蜗杆蜗轮副,另外,在传动链中,还采用锥轮或圆柱齿轮传动,以调整手轮位置,便于炮手操作:采用蜗轮蜗杆传动有其特点:结构简单而能自锁,传动中只能由蜗杆带动蜗轮旋转,而不能反向带动,这样可以使瞄准后炮身的轴线不会自行改变,为保证自锁可靠,蜗杆螺旋角取得较小,一般为3°~6°;蜗轮蜗杆轴交叉90°布置,可方便地改变转动方向;但由于保证了门锁性能而使摩擦力增大,传功效率较低。
螺杆式高低机:这种高低机是靠螺杆副的位移来驱动起落部分以进行高低瞄准。它结构简单,能自锁。但传速比不是常数,射界不能太大,实现机械动力操作困难,一般适用于迫击炮和低仰角范围的小口径火炮。
液压式高低机:由液体作介质赋予炮身仰角的装置。适用于坦克炮和自行炮,并可与减震器相结合;也用于地面炮,一般与平衡机相结合而成高平机。优点是结构紧凑,缺点是可能产生液体或气体泄漏。液压式高低机铰接于上架上,液体注入迫使活塞杆伸出时,带动摇架转动,减小仰角;液体流出时,平衡机内压缩空气将活塞杆压回,带动摇架向下转动,增大仰角。液体的注人流出可由人力转动手轮或以安装在上架(或摇架)上的液压泵驱动。
高低机反应速度迅速与否以及精确度的好坏直接关系到火炮的性能的优劣。由于高新技术在兵器领域的广泛应用,为适应现代化战争的需要,因此,本课题的研究对于火炮设计具有重要意义。
国内外火炮高低机技术的研究发展既与科技发展有关,也与军事战略思想、仿真有关,前者是技术推动,后者是需求牵引。新概念、新原理、新材料、新技术的应用将促使火炮高低机技术不断发展。近年来国内外对高低机的不自锁现象[1]、咬粘现象[2]和惯性限制器摩擦环磨损故障进行了分析研究并做出了预防与改进[15]。
2. 总体方案设计
2.1 原始数据和技术要求
(1)起落部分转动惯量197.8 kg.m2
(2)高低机高速2rad/s,低速0.5rad/s
( 3) 高低射角为-0.0873rad~-1.57rad(-5°~-90°)
2.2 高低机总体传动方案设计
由于设计的多解性和复杂性,满足某种功能要求的机械运动方案可能会有很多种,因此,在考虑机械系统运动方案时,除满足基本的功能要求外,还应遵循以下原则:
1.机械系统尽可能简单。
2.尽量缩小机构尺寸。
3.机构应具有良好的动力特性。
4.机械系统具有良好的人机性能。
综合个方面考虑,高低机传动机构简图如下图所示:
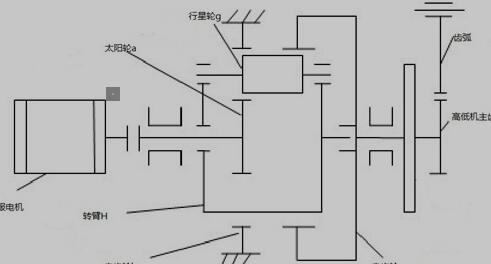
图2.1火炮高低机传动方案简图
由于火炮工作的特殊性,火炮必须具有初速、射速、瞄准速度高,全天候作战和电子对抗能力强,自动化操作反应时间短,机动性好的特点,高低机是驱动火炮起落部分,赋予炮身仰角的动力传动装置。高低机响应速度迅速与否以及精确度的好坏直接关系到火炮的性能的优劣。由于火炮高低机的工作特点,无论是实战还是操练,每天的工作时间少,且为短期间断的工作方式[11]。因此,该火炮的行星减速器的特点为:短期间断工作、传动比大、结构要求紧凑、外廓尺寸小、重量轻、传动效率高。因此,选用3K(Ⅱ)型传动较为合理。综合个方面考虑,选定高低机为高低齿弧式;由伺服电机驱动;减速机构为3K(Ⅱ)型行星齿轮减速器。在传动的末端需专门设置防止逆传动的装置,目前在火炮中,常采用自锁器和摩擦离合器来防止逆传动。与具有自锁能力的螺旋副相比,自锁器有明显的优势:自锁可靠、效率高、结构紧凑、易于加工。因此,在本高低机设计中采用平面凸轮自锁器以防止逆传动[12]。
-
UG某型汽车零件结构刚度分析
-
MATLAB某反后坐装置的优化设计
-
某垂直向下低过载发射系统设计与分析
-
某火箭炮方向传动减速箱动力性能试验台设计
-
155mm口径火炮区域封锁子弹及其引信设计
-
某固体火箭发动机装药结构完整性分析
-
Adams某超轻型火炮结构总体设计与分析
河岸冲刷和泥沙淤积的监测国内外研究现状
酸性水汽提装置总汽提塔设计+CAD图纸
电站锅炉暖风器设计任务书
java+mysql车辆管理系统的设计+源代码
大众媒体对公共政策制定的影响
中考体育项目与体育教学合理结合的研究
乳业同业并购式全产业链...
当代大学生慈善意识研究+文献综述
十二层带中心支撑钢结构...
杂拟谷盗体内共生菌沃尔...