- 上一篇:pro/E自升式钻井平台升降系统设计+CAD图纸
- 下一篇:Simulink气动钉枪工作特性仿真+CAD图纸
目前船用回转起重机主要有两种结构形式,一种为液压折臂式吊机,折臂式吊机传输距离远,操作灵活,但是载重量小,起吊货物在空中不易控制;一种为龙门式变幅吊机,龙门式变幅吊机载重量大,便于实现弃掉物品的稳定。此次设计主要研究折臂式吊机的补偿技术。
下面简单介绍一下国内外几种常见的波浪补偿系统:
2.1.1 主动与牵引复合式
该装置由比例器、控制器、液压马达和距离测量装置等组成。
其工作原理为:在起重机臂架外部增设一台恒张力绞车,绳索的另一端由接收船上的人控制。由于要保证绞车绳索上的张力始终恒定,所以当船晃动产生相对位移时,绞车应以相同速度随两船的运动作正反转运动收放绳索,从而使绳索始终处在张紧状态下。绳索绞车上还装有编码器,将绳索的速度转化为数字信号。液压绞车上也应装有编码器,以便实现对吊放货物的速度的控制。如图2-1所示,因为绳索绞车与两船相连,所以接收船上收放绳索时绳索的速度为:
液压绞车的速度等于绳索的速度:
人在接收船上看时,货物的吊放速度:
此时货物的下放速度完全取决于人放绳的速度。将两个编码器所记录的速度用比例放大器放大,再将数据传递给比例阀,由比例阀实现对速度的控制,从而到达波浪补偿的要求。主动与牵引复合式补偿系统主要是针对两船在垂直方向上的相对位移,可以满足特定情况下海上作业的需要。
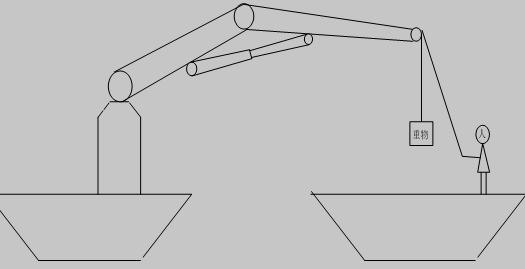
图2-1 主动与牵引复合式补偿装置原理图
2.1.2 油缸加蓄能器的气液混合式
其组成部分有:油缸、蓄能器、滑轮架和滑轮组等,通常安装在起重机塔身内部,并与主升钢索连接在一起。
其原理是:用主升钢索的伸缩替代原来活塞杆的伸缩,即当该装置的活塞杆伸长时,主升钢索就会收缩,当该装置的活塞杆收缩时,主升钢索就会放松,以便达到波浪补偿的目的。其补偿负载取决于蓄能器的压力,补偿幅度取决于活塞杆的行程,补偿响应速度取决于油液流动的快慢,这三项参数都可根据工况要求自行设定。
这一补偿在两个方面功效显著:一方面是大大降低了货物起升和下降时的速度。另一方面,尽管被吊重货物是以最慢速度下降,但由于平台之间还存在相对运动,还会产生一定的撞击力,此时本装置的重力吸收装置就会发挥作用,在货物与平台甲板即将接触的瞬间,传感器将信号传递给高压蓄能器,高压蓄能器开始同步向补偿装置油缸释放高压油,使货物向上进行有限的提升,这样碰撞力就能有效地抵消。重力吸收装置的原理与弹簧和气囊减震类似,进一步保证货物着落的安全。
2.1.3 随动补偿系统
这种波浪补偿装置是由柱塞、储气瓶、随动吊钩及随动小车组成的。工作时将随动吊钩挂接到接收船甲板的适当位置,这样就可以测量接收船的上下位移,当补给船相对接收船产生一定的垂直方向的相对位移时,随动钢丝绳上的张力就会产生变化,钢丝绳就会牵引随动小车运动,带动货物升降,从而实现波浪补偿。在上述系统的随动补偿过程中,起重机钢丝绳几乎不受外界环境影响,可以实现任意收放,从而使起吊货物与接收船间的相对速度保持不变,达到波浪补偿的目的。工作人员可以根据需要自行启动和调整波浪补偿系统,也可以在无风浪的情况下关闭该系统不用,起重机可以在没有任何补偿的情形下工作。
-
Pro/E房车手刹双棘轮式机构设计及分析
-
Pro/E轿车车门自动开关系统设计
-
XY工作平台电路接插件质量...
-
Pro/E火箭方向机试验台转接齿轮箱设计
-
MATLAB排爆机器人稳定平台二维随动控制设计
-
两级稳定平台结构设计
-
Pro/E+ADAMS两自由度机械臂的设计与分析
杂拟谷盗体内共生菌沃尔...
酸性水汽提装置总汽提塔设计+CAD图纸
大众媒体对公共政策制定的影响
河岸冲刷和泥沙淤积的监测国内外研究现状
当代大学生慈善意识研究+文献综述
乳业同业并购式全产业链...
十二层带中心支撑钢结构...
电站锅炉暖风器设计任务书
java+mysql车辆管理系统的设计+源代码
中考体育项目与体育教学合理结合的研究