- 上一篇:特殊材料3D打印设备开发进料系统设计
- 下一篇:压缩空气简易通用发射装置结构方案设计
总重量: 600 kg。
任务要求: (1)论证确定总体方案;
(2)设计水平移动系统的驱动及传动系统;
(3)设计水平移动系统的结构;
(4)编写设计说明书。
2.2 换刀机器人的组成结构
自动换刀机器人的总体组成结构如图2.1所示。
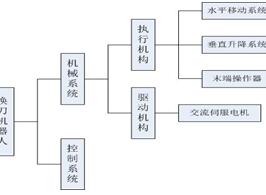
图2.1 换刀机器人的组成结构图
2.3 换刀机器人的要求和功能
换刀机器人的要求有:(1)换刀时间短;(2)机械构造简单,占用空间小;(3)不能与工件或工作台发生干涉;(4)良好的可靠性和定位精度;(5)足够的刀具夹紧力和夹持力。
换刀机器人应具备以下功能:(1)确保机器人末端操作器能达到所有的换刀位置;(2)抓取刀具力量充足,平稳而快速地完成刀具交换,不损坏刀具;(3)能通过控制各轴的运动调整机器人各个关节的位置;(4)接受示教命令,有较强的人机对话功能;(5)在具有报警功能,确保不伤害工作人员以及设备;(6)具有可靠性和安全性[8]。
2.4 换刀机器人的总体设计方案
(1)坐标形式的选择
根据手臂的动作形态,按照臂部关节沿坐标轴的运动形式,工业机器人的类型大致可以分为以下5种: (1)直角坐标型机器人;(2)圆柱坐标型机器人; (3)球坐标(极坐标)型机器人; (4)多关节型机器人;(5)SCARA型机器人。本设计机器人采用直角坐标加旋转的形式。
(2)自由度的确定
本设计换刀机器人有四个自由度。换刀机器人的结构形式为组合式,具有纵向移动、横向移动、垂直升降和末端操作器旋转4个自由度。
(3)重复定位精度的确定
本设计中换刀机器人的重复定位精度设计要求为±0.5 mm,考虑刀具的安放对精度要求不是很高;同时手爪有自定位能力,因而确定可以添加伺服系统利用反馈控制单元来判定准确位置。因为有影响定位精度的相关因素,需要误差补偿。
(4)轨道安装形式的选择
自动换刀机器人的纵向运动空间长12m,横向运动空间宽1.3m,垂直升降高1.6m,使用的是直角坐标系。其特点是结构简单、定位精度高、运动直观性强。导向机构采用直线滚动导轨,根据实际情况,数控机床和刀库在轨道两侧,单轨运行不稳定,且不利于受力,所以采用双轨道导向。又因为数控机床的刀库距离地面1m以上,如果将轨道布置在地面,末端操作器的运动会与数控机床的其它部分产生干扰,妨碍自动换刀机器人工作,因此采用天轨的形式。
(5)驱动方式的确定
换刀机器人的驱动系统是向执行系统各部件提供动力的装置,按照采用的动力源不同,驱动系统可分为液压式、气压式、电气式。一般情况下,一个机器人可以只有一个驱动方式,但也允许是几种驱动方式相结合驱动。
液压驱动的特点是驱动力大,运行平稳,但泄露是不可忽视的、同时也是难以解决的问题;气压驱动的特点是气源方便,文修简单,易于获得高速,但驱动力小,速度不易控制,噪音大,冲击大;电气驱动的特点是电源方便,信号传递运算容易,响应快。本课题自动换刀机器人的水平移动系统、垂直升降系统、末端操作器都选用交流伺服电机驱动。
-
solidworks陶鲁斯pt24/7纯双动...
-
MATLAB枪弹射击精度影响因...
-
基于示功图的自由活塞发动机燃烧过程分析
-
Pro/E轿车车门自动开关系统设计
-
数控加工中心链式刀库设计+CAD图纸+答辩PPT
-
XY工作平台电路接插件质量...
-
40mm3连发自动炮开关闩机构与击发机构设计
乳业同业并购式全产业链...
当代大学生慈善意识研究+文献综述
中考体育项目与体育教学合理结合的研究
十二层带中心支撑钢结构...
电站锅炉暖风器设计任务书
酸性水汽提装置总汽提塔设计+CAD图纸
杂拟谷盗体内共生菌沃尔...
河岸冲刷和泥沙淤积的监测国内外研究现状
大众媒体对公共政策制定的影响
java+mysql车辆管理系统的设计+源代码