- 上一篇:Multisim生命探测雷达超低频微弱信号检测电路设计
- 下一篇:蓝绿波段单通道窄带光子晶体滤波器设计
1.4 论文研究内容与结构安排
本文主要内容是针对车辆追尾报警器系统特点和应用场合,在给定前端和天线的基础上,设计一种具有测距、测速及报警功能的、能够满足报警器系统功能的电路,该工作是整个车辆追尾报警器系统的重要组成部分,包括典型车辆目标信号仿真与信噪比分析、信息提取方案及论证、电路设计与参数优化、电路装调与实验结果。另外,在数字信号处理方法的方面有一定的论述。该系统工作在LFMCW体制下,基于美国德州仪器公司(Texas Instruments)的DSP芯片TMS320F2812,进行具体的外围电路设计。
第一章绪论阐述了车辆追尾报警器的研究背景和意义、国内外的研究现状和数字信号处理在车辆追尾报警系统中的应用和发展。
第二章首先介绍了车辆追尾报警器的功能,研究了车辆追尾预警的大致模型,接着重点介绍了LFMCW雷达的测距测速原理。
第三章对数字信号处理方法以及距离速度信息提取方法进行了研究。在对雷达参数进行设计之后,主要进行了数字滤波器和FFT原理的说明和设计,最后用了Matlab仿真对数字滤波器和FFT进行了功能仿真。
第四章呈现了车辆追尾报警器的硬件电路设计以及软件设计,其中硬件设计涵盖了DSP芯片的介绍,前置滤波放大电路、A/D电路、电源管理电路、时钟电路、复位电路、显示电路、声光报警电路、JTAG接口电路的设计。软件部分主要是利用CCS平台进行了FFT的仿真得到中频频率,提取速度和距离信息。
对全文进行总结。
第二章 车辆追尾报警器功能实现及工作原理
2.1 车辆追尾报警器功能实现
2.1.1 车辆追尾报警器系统
车辆追尾报警器实质就是指根据雷达传感器对前方车辆目标进行测距测速,然后对回波信号进行处理,得出前方车辆目标的距离和速度信息并显示,进而由微处理器对当前车辆状态和车辆周围环境进行危险判决,决定是否发出声光报警信号。
车辆追尾报警器系统结构如下图2.1,三角波发生器产生三角波调制信号,通过压控振荡电路、定向耦合器以及环行器经收发天线发射出去,收发装置接收到的回波与本振信号进行混频之后输出中频信号,经过滤波放大电路进行A/D转化,接着DSP进行处理,得到速度和距离信息,从而进行声光报警。
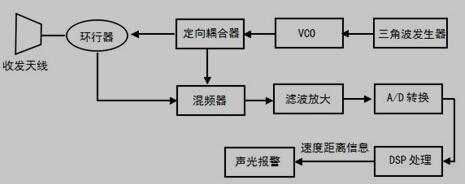
图2.1 车辆追尾报警器系统结构图
本课题设计主要对车辆追尾报警器的进行电路设计,主要是前端的滤波放大电路以及DSP处理部分的数字信号处理硬件电路部分,同时针对具体的信号处理方法在第三章也有具体的阐述。
2.1.2 车辆防碰撞模型的建立
针对车辆是否进行声光报警,这需要研究大量的追尾碰撞事故,建立追尾碰撞安全车距车速模型,以此得出的算法控制声光报警电路工作,使其能在安全行车间距临界点进行有效报警,确保车辆追尾报警器能在实际意义上起到作用,阻止追尾事故的发生。
车辆防碰撞模型建立的根本就是车辆安全间距的确定,而车辆安全间距取决于车辆制动距离以及与前车的相对速度,这包含若干种可能性,考虑到绝对安全,本文建立的安全间距模型只考虑极端情况的安全间距。关于制动距离,与本车和路面之间的摩擦系数以及车辆驾驶员的制动时间有关,车辆与路面的摩擦系数有相应的标准,而制动时间由驾驶员反应时间t1、制动协调时间t2、制动力持续增大时间t3、最大制动力持续时间t4四部分组成,参考文献[10]中列出了具体的运动学方程,得出了各个制动部分车辆行驶的距离,从而得到总的制动距离为:
-
基于IFFT的毫米波步进频率...
-
MATLAB车辆标识识别技术研究
-
滑动窗FFT递推算法研究+MATLAB仿真程序
-
基于DSP的滑窗FFT算法设计与实现
-
基于NUFFT的调频连续波SAR成像方法研究
-
FFT算法的多核DSP实现研究
-
Matlab轨道交通车辆MVB通信网络的研究与设计
当代大学生慈善意识研究+文献综述
大众媒体对公共政策制定的影响
杂拟谷盗体内共生菌沃尔...
java+mysql车辆管理系统的设计+源代码
乳业同业并购式全产业链...
十二层带中心支撑钢结构...
酸性水汽提装置总汽提塔设计+CAD图纸
中考体育项目与体育教学合理结合的研究
河岸冲刷和泥沙淤积的监测国内外研究现状
电站锅炉暖风器设计任务书