- 上一篇:光孤子的理论研究及其在通信中的应用
- 下一篇:TS3基于光纤传感的温度测量系统设计
1.1 系统整体介绍
该系统的组成部分是太阳能光伏板、Buck电路、Boost电路、全桥逆变电路、采样电路和控制电路,如图1所示。第一、太阳能光伏板可以将太阳能变成直流电(DC),然后采集光伏板输出的电压和电流,DSP基于相关算法的最大功率点跟踪控制技术,控制Buck电路,使光伏板的内部电阻和外部等效电阻相等,使光伏板实现最大功率工作;第二、DSP采用滑模控制算法控制Boost电路,实现太阳能电池板输出电压升压电压的稳定控制;第三、DSP通过改善闭环空间矢量(SVPWM+PID)控制算法,控制全桥逆变电路、得到三相交流电 (AC)。
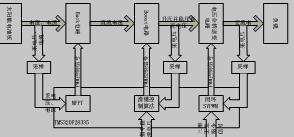
图1 太阳能发电模拟系统整体框图
1.2 最大功率点跟踪控制技术
现阶段国内外研究太阳能控制器的算法很多,但是有很多算法都存在着一定的缺陷,使光伏板不能达到最大功率发电。比如爬山法的步长是固定的,只适应于某一特定值,适用范围很小,甚至步长设置不合适的情况下会出现输出效率低或者出现系统震荡,在日照发生变化的时候还会出现错误的判断的现象;电导量增法确定调节强度的大小的时候很困难,这样调整速度和控制质量就会大大降低,电导量增法的控制算法的步骤相当麻烦,对系统中硬件的要求也比较高,很不容易实现;恒定电压法,当外界条件达不到其标准时候,很难实现这种算法,对外界条件适应性很差,从而影响其控制精度[1]。
本课题采用的是动态电阻匹配法让其实现最大功率功率点的跟踪方法。它的定义是:无损耗电阻器呈现出输入端电阻与负载无关,并且将输入端吸收的能量都转移到输出端。该算法使用电阻匹配理论 (也就是说,当电源电阻和外部电路的等效电阻相等时有最大输出功率),并使用开关装置实现无损耗电阻器件的功能,实现最大功率点的跟踪控制。该方法首先取样的光伏板的输出电压和电流,并根据这一动态光伏板的等效内阻 和外电路的等效电阻 ,使两者相减后,然后用滑模控制器调控直流-直流转化器的空间利用比例,实现光伏板的内部电阻于外部电阻极大可能地趋于相等,使输出功率运行在朝向最大功率点的方向上,最终实现最大功率点跟踪控制。该方法的目的性很强,克服了传统方法步长设定所具有的盲目性,从控制速度,跟踪效果,以及稳定性几方面来看,效果优于传统的电导增量法,以及扰动观察法。
1.3 滑模控制技术
变结构系统的有效控制方法的一种是滑模控制技术,对具有变结构特征的开关转换器是非常适用的,以便它可以获得良好的鲁棒性和瞬态性能。滑模控制技术的理念是通过控制系统使系统状态在任何位置开始都可以引导系统进入预先设计的轨道上去,让滑模控制系统优越的动态品质展现的淋漓尽致。如图2所示。 作为上文提到的变结构系统的输出误差, 作为变结构系统输出误差的一阶导数, 为切换面,系统先经过正常运动,然后再进行滑模运动,最终系统进入稳定状态 ( )。
-
STM32单片机光伏太阳能板随...
-
AT89C52单片机太阳能电池板...
-
AT89S51单片机低电压太阳能充电器设计
-
新型结构钙钛矿太阳能电池的制备和表征
-
5S管理在太阳能电池制备的物质管理方面研究
-
AT89S52单片机硅板太阳能移...
-
基于静电喷射法制备钙钛...
酸性水汽提装置总汽提塔设计+CAD图纸
杂拟谷盗体内共生菌沃尔...
乳业同业并购式全产业链...
电站锅炉暖风器设计任务书
当代大学生慈善意识研究+文献综述
十二层带中心支撑钢结构...
java+mysql车辆管理系统的设计+源代码
大众媒体对公共政策制定的影响
中考体育项目与体育教学合理结合的研究
河岸冲刷和泥沙淤积的监测国内外研究现状