- 上一篇:宽带雷达波形的低截获性能分析
- 下一篇:FIR低通滤波去噪平滑算法研究+文献综述
1.2 论文主要研究工作
1、在选定课题之后,先了解了对超光滑表面疵病检测的方法和本项目将运用的手段和设备原理,然后阅读大量与数字图像处理有关的参考文献,在了解了图像处理的基础理论知识之后,学习了对数字图像进行旋转和平移拼接的知识,形成了基本的前期理论储备。
2、在了解了基于机器视觉的超光滑表面疵病检测系统的原理和检测过程之后,继续着重学习和研究了有关对于数字图像进行各种几何处理的原理。
3、在掌握了利用matlab进行编程和仿真的技术基础之后,因为该检测系统需要多角度分块进行图像的采集,所以在之前的理论基础上改进并推导出对图像进行以图中任意一一点为旋转中心进行旋转和快速平移拼接的算法。最后进行了matlab的编程和仿真,并实现了算法预期的效果。
2. 超光滑表面疵病检测系统
2.1 超光滑表面疵病成像采集系统结构简介
本项目为了检测超光滑表面疵病建立了一个如图1所示的数字CCD显微激光散射成像及图像采集和计算机处理系统,它由数字CCD显微激光散射成像模块、被测样品四文驱动模块和图像采集模块以及计算机图像处理模块组成。
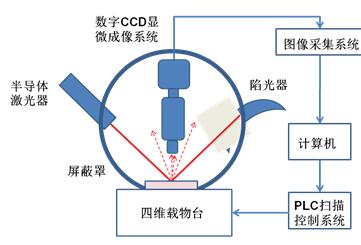
图2.1 超光滑光学元件表面疵病检测的显微散射暗场成像及图像采集系统
在这个系统中,由半导体激光器作为仪器光源,激光器的工作波长为635nm,光源功率大于15mw,激光器投射光斑尺寸(单次测量尺寸)为 ,入射角为 。由于被测元件的表面直径较大,而数字CCD显微成像系统的视场较小,因此为了获取光学元件表面上较小的疵病信息,必须利用数字CCD显微成像系统进行分块子图像放大成像,再利用四文载物台驱动被测元件在水平方向进行平移和旋转的同时,完成对大口径元件表面的扫描采集,再对获得的子图像的序列图像进行旋转和拼接,得到完整的超光滑表面疵病的图像信息。本系统所采用的四文载物台由计算机电控调整,移动精度优于0.05mm,通过标定后的图像定位精度优于0.01mm,可实现数字化控制被测元件在水平方向上平移驱动和元件的旋转。
又根据图2.1的分析可知,超光滑表面光学元件的刻痕疵病方向都是无序、不规则的,因此只有在某些特定的角度下通过光照射才能显现出来,所以需要通过载物台的转动来转动被测元件,以达到激光可以通过不同的角度照射在被测元件的表面上,再通过数字CCD显像系统来获取各个角度的多幅图像,最后进行对数字图像的旋转处理来得到完整的疵病区域。
另外,屏蔽罩是为了屏蔽外界杂散光以获取清晰的图像。陷光器用于吸收折射光和杂散光。最后通过计算机对图像处理后,得到完整的表面疵病图像。
2.2 系统技术过程研究
本项目所涉及的超光滑表面疵病检测系统是利用图像摄取装置CCD(即机器视觉)将待检的超光滑表面转换成图像信号,然后再将所得到的图像信号传送到专用的图像处理软件,接着再由图像处理软件对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来识别图像的内容,它是一门基于计算机和数字图像处理、模式识别等多学科相融合的先进技术。
在具体的实现过程中,主要有下述的几个过程:
1) 图像的获取:利用数字CCD显微成像系统在激光照射场下进行图像的获得,然后再将图像转换成数字信号并导入计算机进行存储。