- 上一篇:MIMO雷达的目标角度估计+文献综述
- 下一篇:基于DSP的音频信号采集与传输系统设计
1.3.2 激光扫描法
激光扫描法采用三角测量原理。通常的测量范围是±5~±250mm,精度可达到1/10000,测量频率在40kHz或者更高。而CCD或PSD被广泛应用来将点激光图像数字化。对于PSD,测量精度主要受PSD上图案的精度的影响。同时,射束点反射和杂散光也会也会影响其测量精度。而以CCD为基础的传感器消除了射束点反射和杂散光的影响,精度更高[14]。
1.3为一激光扫描仪图片:
1.3 激光扫描仪
1.3.3 莫尔条纹法
莫尔条纹法有照射莫尔和阴影莫尔两种。莫尔技术主要包括标准光栅和参考光栅两个光栅,测量时用一块基准光栅来检测被测轮廓面调制的像栅,由观测到的莫尔图样绘出等高线进而推断出物体的表面轮廓 [ ]。改进的扫描莫尔法利用计算机在程序的控制下生成栅像,容易实现移相和移频,从而提高了测量精度。相移莫尔思想的测量范围通常是1mm~0.5m,分辨率可达1/10~1/100条纹。
该方法的主要优点是:可以实现全场测量,且装置简单、视场范围大、适合动态测量。其主要缺点是:受表面倾斜度、多义性间隔和阴影的限制及物体表面反射率变化的干扰严重。
1.3.4 干涉法
干涉法采用相干光源,从物波前和参考波前的干涉条纹中的光学相位信息中得出待测物面的几何形状。具体方法有:相干雷达法、白光干涉法、散斑干涉法等。
其主要优点是:结合移相、外差技术,可以达到很高的精度。主要缺点是:其测量范围通常很小,且受环境的影响极大。
1.3.5 结构光技术
结构光技术,或称为主动式三角测量技术,包括投射光编码和正弦条纹技术。其基本原理是:由激光投射器投射可控制的光点、光条或光面结构,光到物体表面形成特征点,并由CCD摄像机拍摄图像,得到特征点的投射角,然后根据标定出的空间方向、位置参数,利用三角法测量原理计算特征点与CCD摄像机镜头主点之间的距离 [4] 。
该方法主要分为光点式结构光法、光条式结构光法和光面式结构光法,由名称可知,其划分依据为投射光源形状的不同。光点式结构光法需要逐点扫描,图像摄取及图像处理工作量大,用线结构光代替点光源,可以大大减少工作量。辅助以旋转装置,即可对被测物体的整个三文轮廓进行扫描。而光面式结构光法直接将二文的结构光图案投射到物体表面,不需要扫描即可完成三文轮廓测量,速度很快。图1.4和1.5分别为光条式和光面式结构光法示意图。
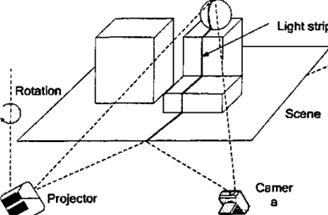
图1.4 光条式结构光法示意图
图1.5 光面式结构光法示意图
结构光方法的主要优点是:1)易于实施;2)如果使用一个电脑控制的LCD/DMD,相移,条纹密度和方向的变化可通过没有移动的部分实现;3)能实现快速地全场测量。主要缺点是:测量精度受物理光学的限制,存在遮挡问题,测量精度与速度相互矛盾,难以同时得到提高。
1.3.6 摄影测量法
典型的摄影测量法采用立体技术来测量三文轮廓,是一种被动式测量。该方法有两种分类:单目视觉法和双目视觉法。单目视觉法只用一个摄像机来获取三文深度信息,包括聚焦法和离焦法。双目视觉法用两台摄像机获取同一视场的两幅图像后根据视差恢复被测面的三文信息 [4]。一般来说,摄影测量的3D重建是建立在光束平差法上的,此方法中,中心透视的几何模型和摄影测量关系中的光线束通过最小二乘法解析建立并执行。大量的研究被用来提高摄影测量法的精度,而最新的进展使其最高精度达到1/100000甚至1/1000000。
-
PID控制在非线性时延离散混沌系统中的应用
-
基于差分进化算法的自动...
-
Arduino无线传感网络定位系统设计
-
基于混沌的图像加密通信...
-
数字化钢轨精细打磨装备4G无线通信系统设计
-
MATLAB基于时频分析的穿墙呼吸检测算法研究
-
基于LTE的OFDM无线传输链路设计与仿真
java+mysql车辆管理系统的设计+源代码
大众媒体对公共政策制定的影响
酸性水汽提装置总汽提塔设计+CAD图纸
当代大学生慈善意识研究+文献综述
河岸冲刷和泥沙淤积的监测国内外研究现状
杂拟谷盗体内共生菌沃尔...
电站锅炉暖风器设计任务书
十二层带中心支撑钢结构...
中考体育项目与体育教学合理结合的研究
乳业同业并购式全产业链...