- 上一篇:PLC小型螺钉自动拧紧系统设计+CAD图纸+梯形图
- 下一篇:PLC的xy两轴螺钉自动装配机械手系统设计+CAD图纸+梯形图
1.4机械臂研究的意义
机械臂属于工业机器人,它能够实现搬运物体等工作,机械臂通常由手臂、手腕和手爪组成[1]。它的普及大大提高了生产率而且减轻了工作强度,更为重要的是产品的质量得到了显著的提高。在一些危险系数比较大或者是劳动强度比较大的场合,它的出现极大避免了事故发生率。
由于机械臂的工作空间比较小使得机械臂功能的拓展非常困难,在此基础上,将机械臂安装在移动机器人上的技术应运而生,这项技术的工作空间不受限制、灵活性好。因此,这项技术的研究显得非常有意义。
第二章 总体方案设计
2.1控制方案设计
根据智能车载机器人运动特点分析可知,控制系统需要同时监控多个电机,可根据调试需要加减电机控制器终端节点,本文基于分级控制的思想设计智能车载机器人控制系统。其中控制框图如2-1所示,上级PC负责调试管理、命令发布等工作;中级总控制器负载协调各个子控制器工作;下级则由各子控制器负责实现各电机的控制。本文主要完成智能车载机器人的腰关节和臂关节的设计如下图虚线框内,其它内容由小组其它成员完成。
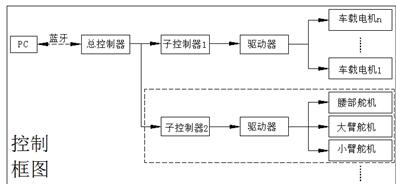
图2-1 控制框图
为了提高机械手抓取物体的精度,我们通过陀螺仪对机械臂旋转的角度进行实时在线监控形成可随时调节的闭环系统,具体控制方案的反馈调节如图2-2所示,通过陀螺仪角度的检测反馈给子控制器2,然后对角度的偏差进行比较计算,再通过PC机对机械臂的位置角度进行调节以达到预期值
-
两关节地面移动机器人控...
-
solidworks陶鲁斯pt24/7纯双动...
-
Solidworks95式步枪智能化导轨设计
-
CATIA小型履带式机器人底盘...
-
吸附式高楼气动擦窗机器人设计+CAD图纸
-
SolidWorks40mm的3连发自动炮炮身设计
-
SolidWorks新型狙击榴弹发射器设计
中考体育项目与体育教学合理结合的研究
当代大学生慈善意识研究+文献综述
十二层带中心支撑钢结构...
酸性水汽提装置总汽提塔设计+CAD图纸
河岸冲刷和泥沙淤积的监测国内外研究现状
电站锅炉暖风器设计任务书
大众媒体对公共政策制定的影响
乳业同业并购式全产业链...
杂拟谷盗体内共生菌沃尔...
java+mysql车辆管理系统的设计+源代码