- 上一篇:PLC地铁车站站台屏蔽门系统设计+CAD图纸+梯形图
- 下一篇:PLC转向架电动转盘设计+CAD图纸+答辩PPT
第二章 机械手总体设计
2.1 基本设计思路
在机电一体化产品中,机械手是典型的一种,注重全局,合理分配各机械手的各各部分承担相应的任务和功能,以提高整体系统性能,它简单的结构、在降低生产经成本中起着举足轻重的作用,与其他机器实现互补功能。
一个完整的工业机械手可以分为以下几个部分:由传感器组成的检测传感部分、有电机提供动力的驱动部分,由单片机控制的部分和机械本体的部分,滚珠丝杆或者齿轮组成的传动部分,传感部分用来检测各各部位运动的位置及时的反馈给控制器,机械部分则包括机械驱动系统和具体机械结构系统。这次毕业设计以小物块的搬运为目的,从一个地方搬运到另一个地方。总体设计框图如下图2-1所示。
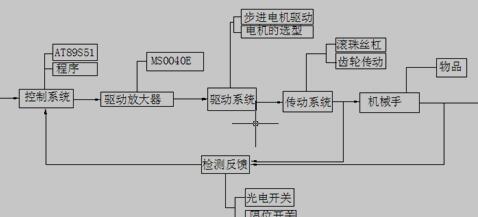
图2-1 总体设计框图
光电传感器用于检测工件,检测到工件后发送信号到单片机,然后单片机根据程序发送信号给驱动芯片,接着驱动芯片驱动伺服电机运转,伺服电机带动传动部件,传动部件将伺服电机输出的驱动力传递给机械手式机械手运动,光电编码器检测转速反馈给单片机,单片机根据反馈的信息作出调整。计算机可以将程序上载到单片机或者从单片机下载程序到计算机。
2.2运动方案的选择
机械手经常用于堆垛和搬运,在坐标形式下可以点为圆柱、直角、垂直关节等坐标类型、等不同形式的运动,以满足不同生产过程的需要,有时采用不同的结构,具体使用哪种形式,根据工作实际情况来决定,以及前后工件的加工中心线方向的变化、分析、比较和选择。直角坐标型机械手的原理如它每个关节都独立运动,运动和控制都比较简单;不足是占用的地方大,工作范围小,控制的时候反应不灵敏
-
两关节地面移动机器人控...
-
MATLAB枪弹射击精度影响因...
-
ANSYS二维弹道修正引信张开...
-
小型机械零件装配生产线...
-
MATLAB排爆机器人稳定平台二维随动控制设计
-
ansys四自由度并联高速搬运机器人创新设计
-
Pro/E+ADAMS两自由度机械臂的设计与分析
java+mysql车辆管理系统的设计+源代码
河岸冲刷和泥沙淤积的监测国内外研究现状
十二层带中心支撑钢结构...
当代大学生慈善意识研究+文献综述
酸性水汽提装置总汽提塔设计+CAD图纸
杂拟谷盗体内共生菌沃尔...
乳业同业并购式全产业链...
电站锅炉暖风器设计任务书
大众媒体对公共政策制定的影响
中考体育项目与体育教学合理结合的研究