- 上一篇:国内外数据采集系统研究现状和参考文献
- 下一篇:光伏发电研究现状及趋势
折反射全方位立体视觉系统的相关研究在20世纪60年代末70年代初开始。进入90年代,该视觉系统得到了迅速的发展,各类设计层出不穷,应用面不断拓宽。相比之下,国内在这方面的研究较少,处于基础研究阶段。这种视觉系统利用反射镜扩大相机的视场(如图1.1所示),对于相机没有特殊要求,成像装置简单。 67656
图1.1折反射全方位立体成像系统
这几年折反射视觉系统得到了长足的发展,下面介绍几种典型的折反射全方位立体视觉系统。
(1) 单相机单镜面折反射全方位立体成像系统
Roland Banschoten和Ben Krose[16]在用于侦察的机器人顶端安装了折反射视觉系统,这一系统结构较为简单,只使用了一个相机并通过一个双曲面镜扩大视场,结构如图1.2所示,移动时机器人将图像序列进行采集从而实现具有多基线特点的立体视觉。这种系统应用于机器人时需配备精确的导航传感器,且为保证成像的精度,机器人移动时不能有较大幅度的颠簸,因此对于室外复杂环境适应性能较差。
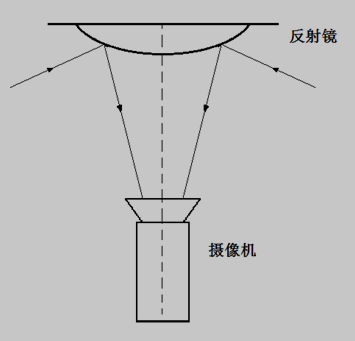
图1.2装有折反射成像系统的侦察机器人
(2) 双相机双镜面折反射全方位立体成像系统
贾云得 [17]等人设计的折反射视觉系统将两套双曲面镜和相机组成的系统配合使用,如图1.3所示。这一系统可以探测到位于其前、后视场的物体,但因为配置的是水平基线,导致测量精度不够均匀。同时,因为两套反射镜和相机相互遮挡,所以对体统两侧图像采集存在缺失,无法进行三维恢复。
图1.3 水平基线双目立体视觉系统
Gluckman等人将两套折反射全方位成像系统进行组合,以获得性能更为优越的全方位立体成像装置,如图1.4所示。
a) 结构示意图 b) 结构装置图
图1.4 两套折反射全方位成像系统组成的全方位立体成像装置
在这种装置中,使用抛物面反射镜和配有远心透镜的相机构成每套折反射全方位立体成像系统,称之为抛物面折反射全方位成像系统。该系统特点如下:1)需要使用远心透镜才能成像;2)所成图像满足单视点的约束条件3)系统结构较为紧凑。得益于系统中所使用的远心透镜,从反射镜到到透镜光线为平行线,便于减小反射镜与相机间距离。另外,两套成像系统被放置在特定位置以保证它们的光轴重叠与垂直位置上,这样可以减少两套系统互相遮挡的范围。该全方位立体成像系统已经在奔腾ⅡPC机上实时产生全景视差图。
(3) 三个全景成像系统配合工作的全景立体成像装置论文网
George G. Barton[18]提出了一种使用三个广角全景相机相互配合工作以获取全景图像的装置,结构如图1.5所示。
图1.5 三相机全景成像系统
组成整个装置的每个折反射成像系统都有360°的水平视场,将水平视场等分视场均120°的Ⅰ、Ⅱ、Ⅲ部分。由图1.5可看出,遮挡区域分布在AⅡ、BⅡ、CⅡ处。A、B、C这三个折反射成像系统的不同部分组成了整个全方位视觉装置,见表1.1。
表1.1 三个全景相机全方位立体图像对的视场区域
视场 左眼像 右眼像
0~120°
120°~240°
240°~360°