- 上一篇:三维打印的发展研究现状与应用前景
- 下一篇:滚珠丝杠副寿命研究现状国内外研究现状
并联机器人可以串联机器人的结构缺点,正是由于这个原因并联机器人的受重视程度越来越高,许多研究人员都在研究并联机构,但是并联机器人因为其固有的多运动支链的原因,使得并联机器人的构造相对串联机器人更为复杂,给并联机器人的研究设计工作带来许多困难。多个运动支链共同作用于末端执行机构,使得并联机构在协调位置姿态控制方面难度大增,对并联机器人的推广运用带来了困难,也限制了其性能优势的发挥 。并联机器人按照自由度可划分为:二自由度并联机器人、三自由度并联机器人、四自由度并联机器人、五自由度并联机器人和六自由度并联机器人,自由度不足六个的并联机器人被称为少自由度并联机器人[6]。六自由度并联机器人的工作空间小,往往需要很大的机构去实现很小的工作空间;运动学分析尤其是位置正解很困难,机构难以控制。正是由于这些问题,使得少自由度并联机器人的优势越来越突出。与六自由度并联机构相比,少自由度并联机构的构造简单,成本低廉,控制算法简单,机构运动学和动力学理论更加完善,运动解耦容易,应用前景十分广泛。48022
近年来少自由度并联机器人的研究成果丰硕,许多研究人员提出了各种各样的少自由度并联机器人。八十年代,亨特发明了一种三自由度的空间并联机构;九十年代,Delta提出了著名的Delta机构[7]。二自由度并联机构是自由度最少的并联机构,它可以完成平面内任意二自由度的运动以及指定点的定位,既可以采用平面机构的布置方式,也可以采用空间机构来完成。有多种机构形式可以构成二自由度并联机器人,目前应用较多的有RPRPR、RRRPR、RPRRR、RPRRP、PRRRP等,其中平面5R(RRRRR)对称并联机器人机构最具代表性,如图1.3所示,它由5根连杆和5个转动副构成,两根与驱动滑块相连的连杆作为驱动杆[8]。很多国内外学者都研究过这种平面5R机构,提出了很多衍生机够并完善了它的机构学理论、运动学和动力学分析、控制算法、姿态控制,以及研究可能出现的奇异位置。孙立人[9]用移动副来替换平面5R机构的部分转动副提出了如图1.4所示的平面RRRPR并联机器人,以及如图1.5所示的由两根连杆三个转动副发明的平面两自由度机器人,其刚度和精度性能都不错。
1.3 平面5R并联机器人 4平面RPRPR并联机器人
两自由度并联机器人 二自由度平动并联机器人
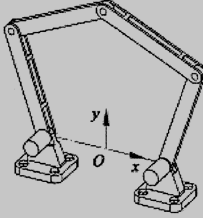
如图1.6所示,袁剑锋[10]等人发明了一种采用平行四边形支链结构约束的二自由度并联平移机器人,可以在运动平面内进行平移运动。如图1.7所示,王忠飞[11]等发明了一种仅含转动副的二自由度平动机器人,这种并联机器人在垂直于运动平面方向的刚度有所提高,并且结构刚度可以通过可控阻尼杆来调节。但是这种机构没能彻底解决平行四边形机构的结构缺陷,所以不能彻底解决结构刚度方面的问题,由于需要两根可控阻尼杆来调节,所以使得机构难以控制,并且制造成本高昂。如图1.8所示,杜正春,高峰[12]等发明了一种二自由度并联机构,利用滑动平台和连杆来约束机构使其可以在滑动平面内实现二自由度运动,并且可以输出运动解耦。但是这种机构在本质上还是一种平面机构,也无法根本解决在垂直于运动平台方向的刚度不足的问题。
二自由度平动机器人两自由度平面并联机器人
黄田[13]发明了一种可以实现拾取和放置功能的二自由度平移并联机器人,这种机器人采用被动平行四边形之链结构,并且具有一对摆动臂,并命名为Diamond机器人。如图1.9(a)和图1.9(b)所示,Diamond机器人可以具有一个或两个平行四边形支链。两个平行四边形支链结构的机器人具有对称性,并且提高了系统刚度。李秦川[14]发明了一种横向尺寸比较小的二自由度并联平移机器人,如图1.10所示,这种机器人将两个平行四边形支链互相交叉起来,加强了系统刚度。除此之外,有些不采用平行四边形支链结构的平面二自由度并联机器人,比如范顺成[15]发明了这一种实现输出解耦的二自由度并联平移机器人,这种结构利用了两个互相垂直的移动副,结构新颖。