-
在20世纪40年代,人类开始研究机械手。接着不久之后,计算机诞生,自动化技术迅猛发展,为后来人们对机械手的研究打下了扎实的基础。起初,人们为了满足大批量生产的需求,不断投入对机械手的研究。与此同时,在军事方面,也需要自动化的机械手来完成一些繁重、危险等等人手难以完成的任务。基于这些方面的需求,美国科学家先后研究设计出了一种可以遥控控制的机械手和一种主从式的机械手。20世纪50年代末,在美国诞生了世界上第一台机械手[5]。随着科学技术的快速发展,以及不同行业不同生产环节的需求,传统的机械手已经无法满足发展,于是一种仿人手的机械手正成为各行各业生产部门的新宠。18909
- 上一篇:含氟灭火剂国内外研究现状
- 下一篇:行星齿轮差速器实验台的研究现状
在国外,五指仿人机械手最先应用于医疗方面,当初的五指机械手是用在残疾人假肢上的。从20世纪80年代以来,科学技术迅猛发展,自动化水平不断提高,五指机仿人机械手已经不仅仅用于残疾人假肢之上,在工业、农业、,军事等许多方面,也有了很广泛的应用。并且,如今的五指仿人机械手正向着多自由度、高精度、高复杂程度等发展,能够应用于各种复杂的工作环境之下[6]。
国外的研发人员对机械手研发时间早、研发投入大,硕果累累。1982年,美国Utah大学工程训练中心与MIT人工智能实验室共同开发了Utah/MIT机械手[7],如图1.1所示。该机械手的外形、手指形状、关节数目等等都与人手类似,但拇指只能起固定作用,不能完成人手拇指的运动。论文网
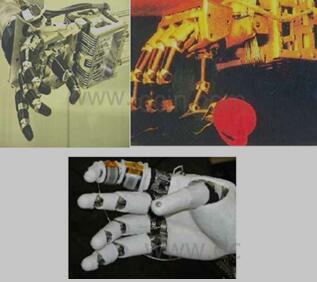
图 1.1美国Utah/MIT机械手
上世纪末,美国航空航天局(NASA)与通用电气公司共同开发了一种名为Robonaut的航天机器人[8],如图1.2所示。它的五指机械手结与生物手手相似度极高。正是由于它拥有着一双与人手极为相似的机械手,使得它能够在太空舱外替代人类来完成舱外文护等比较危险的工作。该机械手具有五指结构,共计14个自由度,具有良好的稳定性与可靠性。
图 1.2 Robonaut机械手
日本在机械手领域的研究成果也比较多。日本的Gifu[9-10]大学在仿人机械手研究领域也有不少成果,包括Gifu-I手、Gifu-II手、Gifu-III手,如图1.3所示。其中Gifu-II手和Gifu-III手都具有五指结构,其中Gifu-II手结构与人手结构、功能尤其相似,常用于医疗康复领域。此外,日本的一种名为ROBOCASA的机械手,是由意大利与日本的两所著名大学的机器人研究所共同研发的,它在机械手领域处于比较领先的地位。
图 1.3 日本Gifu机械手
英国的shadow机器人手,也是五指仿人结构,该机械手是由英国科研部门于21世纪初研制而成,由如图1.4所示。它共有24个自由度,能完成多种不同的复杂动作,在机械手领域具有一定的代表性。到2004年,shadow机械手[11]已经投入批量生产,并且进行了商业应用。
图 1.4 英国shadow机械手
此外,意大利、德国、法国等国家在五指机械手领域的研究也在世界范围内比较领先,各国科研部门以及各国著名大学的研究人员都研制出不少五指机械手结构。到目前为止,世界各国研制出的五指机械手结构大约有两百多种。
1.3.2 国内发展状况
我国对五指机械手的研究在世界上也比较领先。国家科技部863计划中,也专门确立了一项针对五指机械手研究的课题。国内很多高校都设有专门的研究部门,来进行五指机械手的设计研究。比如,哈尔滨工业大学、南京航空航天大学、北京航空航天大学、北京理工大学等等[12]。