-
目前,非球面的检测方法大概可以分为接触式以及非接触式两大类。从原理上看,可分为三类:利用光的直线传播性质的几何光线法、利用光的波动性的干涉测量法、利用探头对整个被测面进行扫描的直接面形轮廓法。迄今为止,比较成熟的测量方法主要有刀口阴影法、哈特曼常数法、朗奇法、样板法、补偿法等。但是这些方法都存在着一定的局限性,适用不了种类繁多、高精度大型非球面轮廓测量的需要。随着科学技术的不断发展,在现代光学技术不断发展的背景下,出现了很多更高精度的检测方法,相关的数据处理也都是由计算机来自动完成的,这也是非球面检测技术的一个发展趋势[1]。26420
- 上一篇:国内真伪币识别技术研究现状
- 下一篇:光掩模国内外研究现状
随着科技的发展,不同行业对于非球面镜检测的精度要求越来越高,非球面轮廓检测技术也随之提高。非球面的微观三文轮廓测量法主要有白光干涉扫描法;而宏观轮廓测量法主要有直角坐标轮廓测量技术、基于曲率测量的非球面轮廓测量技术、摆臂式轮廓测量技术三大方向[2]。此外,针对镜面陡度较大的非球面还提出了子口径拼接非球面轮廓测量技术[3]。以下将简要介绍与扫描法相关的非球面宏观轮廓测量技术的发展现状。论文网
1 直角坐标轮廓检测
镜面轮廓检测获得的面形信息多数都建立在固定的坐标系下,而直角坐标系是最经典也是最常用的坐标系。早期的轮廓检测方法多采用直角坐标,并由此制造出线性轮廓仪。基本原理如图1.1所示。这种测量方法主要是通过测量非球面镜待测表面多条子午截线,实现对非球面表面轮廓的检测。在测量时,由于只存在测量传感器的纵向运动,所以该检测方法运动的自由度少,耦合误差也小,测量精度高。但受制于所采用的测量传感器的量程,该方法无法测量高陡度的非球面镜。
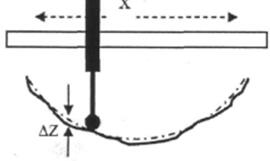
图1.1 非球面直角坐标测量原理图
目前在国内,华中科技大学、天津大学、浙江大学等都对直角坐标测量方法开展了一定的研究工作,并研制了相关的直角坐标测量系统。其中长春光机所研制的双测头接触式轮廓仪,由于采用实时导轨误差分离技术从而实现了高精度的轮廓测量,在l米测量范围内可以达到高于2μm的测量精度[1]。
2 摆臂式轮廓测量系统
非球面的一般表达式为:
(1.1)
式(1.1)中, , 为曲面顶点处的曲率, 为二次曲面系数, , , , , 为高次非球面系数。
从上述的非球面表达式可以得到如下结论:任何非球面都可以看成与球面有一定偏离量的曲面,即任何一个非球面可以通过与其最接近的参考球面和相应的偏离量(非球面度)来唯一确定[2]。摆臂式轮廓仪的测量原理是:测量非球面与其最接近的参考球面之间的偏差即非球面度来实现对非球面面形的精确测量[3]。图1.2为摆臂式测量的原理图。
(a) 摆臂式测量凹非球面原理图 (b) 摆臂式测量凸非球面原理图
图1.2 摆臂式测量的原理图
以图1.2(b)中测量凸面的表面轮廓原理图为例,设被测非球面顶点处的曲率半径为AO=R,顶点为A,O为曲率中心,被测镜面坐标系为(X,Y,Z),坐标原点为其顶点O,被测镜的光轴方向为Z轴方向,X,Y,Z之间满足右手定则。OC为测量偏转轴,OC⊥BC,BC为长度为L的测量臂,传感器为BA,A为测量点,所用测量直角坐标系(X1,Y1,Z1)的坐标原点为O1,Z1为CO方向,X1为AO1方向,X1,Y1,Z1满足右手定则。偏转轴CO与光轴OB的夹角为 ,偏转轴CO与光轴OB交点为O。当整个测量系统绕偏转轴OC转动时A的轨迹即为测量轨迹AA1NMA2A。测量探头A的读数即为所测非球面镜与半径为R的标准球面之间的片力量, 。