- 上一篇:被动毫米波安全检查系统国内外研究现状
- 下一篇:LC压控振荡器的设计ADS仿真+VCO原理图
由于调频测距的方法在连续波雷达或无线电调频高度表等领域中运用广泛,线性调频连续波信号处理技术也较为成熟,本课题也选用了该技术对调频定距系统进行相关的研究。当所研究和讨论的定距系统中的目标相对于系统存在相对运动,对其进行仿真和分析时,也可以借助于日臻成熟的仿真软件平台Matlab,MathworkS公司推出的基于Matlab平台的Simulink是动态系统仿真领域中最为著名的仿真集成环境之一,Simulink能够帮助用户迅速构建所讨论研究的动态系统模型,并在此基础上进行仿真分析,通过仿真结果修正系统设计,从而快速完成系统的设计。这样可以结合理论分析和动态仿真来更全面地研究所讨论的运用广泛的调频定距系统,从而也就更有利于推动调频定距系统的不断完善和发展。
1.2 论文工作安排
本文主要针对调频定距系统信号处理进行理论分析,给出了适合引信的定距的方案,仿真论证其正确性,并在此基础上完成了中心控制单元,信号处理电路的设计、制作、以及调试工作。还为配合试验设计制作了相应的采集系统。本文分为六章,各章主要内容如下:
第一章绪论介绍了调频测距原理、发展、优势,主要就其背景及科学意义进行描述。
第二章介绍了调频测距系统及调频多普勒测距系统原理,进行了详细的理论推导,给出了适合调频多普勒定距的信号处理方案。
第三章介绍了三角波调频多普勒定距系统仿真。详细推导了三角波差频信号的原理,并进行了系统的仿真,最后给出了实现方案。
第四章介绍了电磁环境模拟系统的研究背景。分析的干扰信号的分类、作用机理、信号功率的计算,为接下来的信号仿真做准备。
第五章介绍了高斯白噪声的干扰。先对高斯白噪声进行理论研究,然后进行仿真,观察结果得出结论。
第六章介绍了周期信号调幅干扰。先从理论上分析锯齿波信号的干扰机理。然后进行仿真,计算信噪比,得出在何时锯齿波信号对原信号干扰作用明显。
第七章介绍了周期信号调频干扰。先从理论上分析锯齿波信号的干扰机理。然后进行仿真,计算信噪比,得出在何时锯齿波信号对原信号干扰作用明显。
2调频定距原理及定距系统方案设计文献综述
2.1调频定距系统原理
在一般情况下,调频定距系统的工作原理是通过测量差频的频率从而确定目标作用距离。图2.1.1是调频测距系统的原理性框图[3],主要由天线、振荡器、调制信号发生器、混频器、中放、鉴频器以及执行级等部分组成。
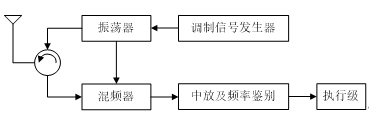
图2.1.1 调频定距系统原理框图
调频系统发射信号的频率是时间的函数,在无线电信号从引信发射到遇目标后返回这段时间内,发射信号已经发生了变化,于是导致回波信号的频率与发射信号频率不同,两者之间的差值的大小与引信到目标间的距离有关。测定其频率差,便可得到引信到目标的距离。由图2.1.1可见,差频信号是在混频器输出端得到的,然后通过信号处理,当达到要求的作用距离时,给执行级输出启动。
现以三角波调制为例,说明其原理。图2.1.2为时间—频率曲线,发射信号为线性调频信号,其频率随时间按线性规律变化,电磁波在弹目间往返时间为: ,其中 为电磁波传播速度, 为引信到目标的距离。
图2.1.2 三角波调频的时间频率图
图2.1.2可见,差频信号频率的高低取决于弹目间往返时间 ,即对应于弹目距离的大小 。设 为载波频率,2 为调制的最大频偏, 为发射信号频率, 为回波信号频率, 为差频信号频率。则
-
MATLAB基于时频分析的穿墙呼吸检测算法研究
-
matlab数字测频算法的仿真和研究
-
Matlab数字下变频器的FPGA实现
-
matlab多光谱光场相机研究
-
MATLAB视频图像液滴速度检测技术研究
-
Matlab数学形态学的图像分割算法研究
-
Matlab图像纹理特征提取与实现
当代大学生慈善意识研究+文献综述
电站锅炉暖风器设计任务书
中考体育项目与体育教学合理结合的研究
大众媒体对公共政策制定的影响
杂拟谷盗体内共生菌沃尔...
河岸冲刷和泥沙淤积的监测国内外研究现状
java+mysql车辆管理系统的设计+源代码
酸性水汽提装置总汽提塔设计+CAD图纸
乳业同业并购式全产业链...
十二层带中心支撑钢结构...