- 上一篇:场路分析FDTD的模拟分析+文献综述
- 下一篇:多用户对双向中继波束成形与功率分配算法研究
智能手机在人们的现代生活中已成为不可或缺的部分,其发展不仅推动了基于LBS的广泛应用,也为室内定位技术的研究提供一个新的平台。
2 惯性导航系统
2.1 惯性导航系统原理
惯性导航系统(INS)是一种以惯性原理为理论基础,应用高精度的陀螺仪和加速度计等惯性敏感器件测量运动载体的加速度,再经过计算机解算出运动载体的导航参数(如加速度、位置、姿态、航向等)的自主式导航系统。
基于初始位置、方向和速率,INS连续不断地计算一个移动目标的位置。因此,INS由配备传感器的实体组成:通常为一个用来衡量数据的惯性测量单元(IMU)和用来处理数据、计算位置的算法。
其中,IMU负责测量加速度和旋转。它由三个部分组成:三个互相垂直安装的加速度计和陀螺仪,分别用来测量三个自由度的加速度和角速率;导航计算机:采集数据,并进行分析和解算;控制显示器:显示解算出的数据结果[3]。为获得自由IMU的751度的初始方向,必须在各个方向设置传感器,因此至少需要751个传感器:三个旋转(俯仰、滚转、偏航)和三个加速度(x,y,z)。
测量IMU数据的算法称为航迹推算。基于初始位置,借助于当前的运动方向、速度或距离,可以计算出当前位置。除了初始位置,这个系统完全独立于外部数据源,从而允许隐私友好的自我定位。然而,小型传感器容易出现测量偏差从而导致漂移和位置错误[4]。
2.2 惯性导航系统分类
根据导航坐标系构建方法的不同,通常将惯性导航系统分成两类。
2.2.1 平台式惯导系统
将加速度计安装于由陀螺仪控制的稳定平台,平台始终与导航坐标系保持一致。构成框图如图2.1。
平台式惯导系统的稳定平台始终跟踪一个不受载体运动影响的导航坐标系,因此具有工作环境好、精度较高、系统对算法要求低的优点。但由于体积大,可靠性差,结构复杂等缺点,逐步被捷联式惯导系统所替代。
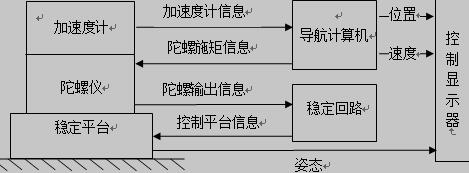
图2.1 平台式惯导系统原理图[5]
2.2.2 捷联式惯导系统(SINS)
捷联式惯导系统将加速度计和陀螺仪直接安装在载体上,输出运动沿载体坐标系的分量,再通过坐标系转换将数据变换到要求的导航坐标系,根据初始时系统对准的速度和位置信息,最后通过积分得到载体的位置和速度信息
-
基于蓝牙的智能手机虚拟...
-
AT89C51单片机电热水器智能...
-
AT89C2051单片机机房电源智...
-
应用于WSN节点的5GHz低功耗分频器设计
-
51单片机智能频率计的设计+电路图+程序
-
MSP430F149智能功率因数补偿研究
-
基于GPS/BD和GSM 的智能汽车报警装置+程序
当代大学生慈善意识研究+文献综述
十二层带中心支撑钢结构...
中考体育项目与体育教学合理结合的研究
大众媒体对公共政策制定的影响
java+mysql车辆管理系统的设计+源代码
乳业同业并购式全产业链...
电站锅炉暖风器设计任务书
酸性水汽提装置总汽提塔设计+CAD图纸
河岸冲刷和泥沙淤积的监测国内外研究现状
杂拟谷盗体内共生菌沃尔...