- 上一篇:ANSYS+MEMS微小型引信安全保险机构设计
- 下一篇:电动汽车用两档变速传动系统中的轮系设计
第二章为汽车自动驾驶机器人总体方案设计
第三章为汽车自动驾驶机器人执行机构的设计与优化
第四章为运用Adams软件対设计的汽车自动驾驶机器人执行机构进行仿真和分析
第五章为运用CATIA软件进行对汽车自动驾驶机器人的三维建模,运用有限元分析方法对所选材料进行校核
1.6 本章小结
本章主要介绍了汽车自动驾驶机器人目前的运用背景和状况,目前主要用于各汽车试验中,用于替代驾驶试验员,提高实验效率、精准度和安全性。重点分析了,目前国内外汽车自动驾驶机器人研究的现状,以及本课题的主要工作,本文的主要内容。
2 汽车自动驾驶机器人总体方案设计
2.1 引言
进行汽车自动驾驶机器人执行机构的设计与仿真,首先必须确定汽车自动驾驶机器人的总体方案设计。第一章讲解了现今国内外对驾驶机器人的设计研究状况,本章将详细讲解国内外的有关对驾驶机器人的设计方案及理念,并在此基础上设计本课题汽车自动驾驶机器人总体方案。
2.2 汽车自动驾驶机器人结构构成
汽车自动驾驶机器人机构主要包括五个部分:换挡机械手、油门机械腿、制动机械腿、离合器机械腿、机座装置。换挡机械手负责操作汽车变速杆,实现汽车变速时的挂挡和选档功能。油门机械腿、制动机械腿、离合器机械腿等分别负责对油门、制动和离合器的操作。机座装置固定于驾驶员座椅上,用来作为换挡机械手、油门机械腿、制动机械腿、离合器机械腿的固定基座。由于油门、制动和离合器三者本身结构类似,而且运动轨迹也大致相当,所以油门机械腿、制动机械腿和离合器机械腿三者在设计结构上也相类似。三者并排固定联接于机座装置前方,并分别与油门、制动和离合的踏板固定。换挡机械手固定于驾驶员座椅变速杆侧。汽车自动驾驶机器人系统组成结构见图2.1。
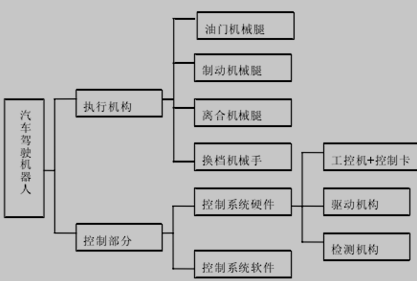
图2.1 驾驶机器人系统组成
2.3 机器人本体的设计原则
汽车自动驾驶机器人作为一种机电一体化系统,其机器人本体的设计应遵循机电一体化系统中机械系统的一般设计原则。因此,为确保机械系统的传动精度和工作稳定性,在机器人本体的设计中,应做到以下几方面:
(1)减少摩擦。采用低摩擦阻力的传动部件和导向支承部件。
(2)提高刚度。应选用刚度较好的材料,并合理选择臂部截面形状和轮廓尺寸。
(3)减轻重量,缩小体积使结构紧凑。如选用高强度轻型复合材料。
(4)减小或消除传动间隙。
(5)增加抗振性。提高静刚度,增加阻尼、提高固有振动频率等措施都可以增加系统的抗振性。
-
UG某型汽车零件结构刚度分析
-
汽车后桥横臂式悬挂系统设计+CAD图纸
-
发动机润滑油对汽车NVH性能的影响研究
-
UG汽车遥控器下壳注塑模具设计+CAD图纸
-
solidworks陶鲁斯pt24/7纯双动...
-
ADAMS/Car轮毂电机驱动大学...
-
Pro/E轿车车门自动开关系统设计
乳业同业并购式全产业链...
中考体育项目与体育教学合理结合的研究
电站锅炉暖风器设计任务书
java+mysql车辆管理系统的设计+源代码
十二层带中心支撑钢结构...
杂拟谷盗体内共生菌沃尔...
酸性水汽提装置总汽提塔设计+CAD图纸
河岸冲刷和泥沙淤积的监测国内外研究现状
大众媒体对公共政策制定的影响
当代大学生慈善意识研究+文献综述