- 上一篇:固体随行装药内弹道性能研究
- 下一篇:CATIA某型电动汽车-总体设计建模
1)对目前国内外常规破片速度测量方法和速度测量系统的校准方法进行分析,并提出使用激光测距对光幕靶靶距进行校准,以此辅助速度校准系统。
2)阐述了激光测距的原理,并比较不同的方法的优劣点。
3)结合速度监测系统的机械机构及光幕靶校准系统的技术指标,设计出激光测距系统设计,包括激光传感器及加装机构的设计。
4)根据系统要求,通过LABVIEW完成软件设计,主要功能有:1.确立基准靶,计算其于传感器的距离,并给出其余靶位的理论位置;2.实时采集各靶位的实际位置,用于靶位校准。
5)对破片速度测量系统校进行实弹校核,通过计算实验结果反向验证激光测距系统是否设计成果。
6)总结全文主要工作,分析论文工作的不足,对后续工作做出展望。
2 激光测距的原理
2.1 脉冲激光测距的原理
激光技术经过多年研究日益成熟,目前的宽度能够轻易达到几十个纳米级别,激光脉冲的好处在于瞬时功率大且能量集中[17]。激光脉冲测距有很多好处:在测短距离目标时,不需要其他辅助工具,只需对被测目标发射漫激光脉冲信号,接着回收反射回来的激光脉冲信号就可以进行测距,要想提升测距距离,只需增加其他辅助工具。正如上述所说的脉冲激光测距特点,其广泛应用在军事或民用,天文或地理等方面。脉冲激光测距系统的原理是:测量被测目标与系统之间激光脉冲信号往返的时间,然后算出距离。下面的原理图是脉冲式激光测距系统的[11],如图2.1所示。
距离L
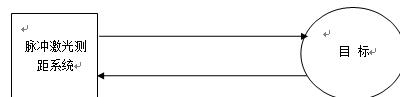
图2.1 脉冲激光测距原理图
工作过程为:首先激光器发出周期性的激光脉冲信号,激光脉冲信号接触到被测目标后,发生漫反射,被测目标反射回来的激光脉冲信号会被系统上的光电探测器接收到,激光脉冲发射时刻 会被系统记下。时刻 为探测器接收到激光脉冲回波信号的时刻。设系统和被测目标两者的距离为 ,则公式为:
(2.1.1)
2.2 相位式激光测距的原理
相位式激光测距[12]的原理:激光器向目标物体发射经过调制后的激光束,然后会发生反射,反射回来的调制光束会被光电探测器接收到,接着系统会计算发射和反射两个光束之间的相位差,已知系统与目标间的距离信息包含在光束的相位差里,所以可以通过相应的公式将相位差转化为距离值。正是使用了相位差测量技术和激光调制技术,所以相位法激光测距系统的测量精度很高,如果在有辅助工具的场合,就可以选择使用相位式测距。相位式激光测距的原理如下图2-2所示.
图2.2相位式测距原理1
设经过调制后的激光波的频率为 ,则可以知道波长为:
(2.2.1)
(2.2.1)式中 是光速,调制波波长为 。由图2.2所知,A与B之间的调制光波的相移 为: